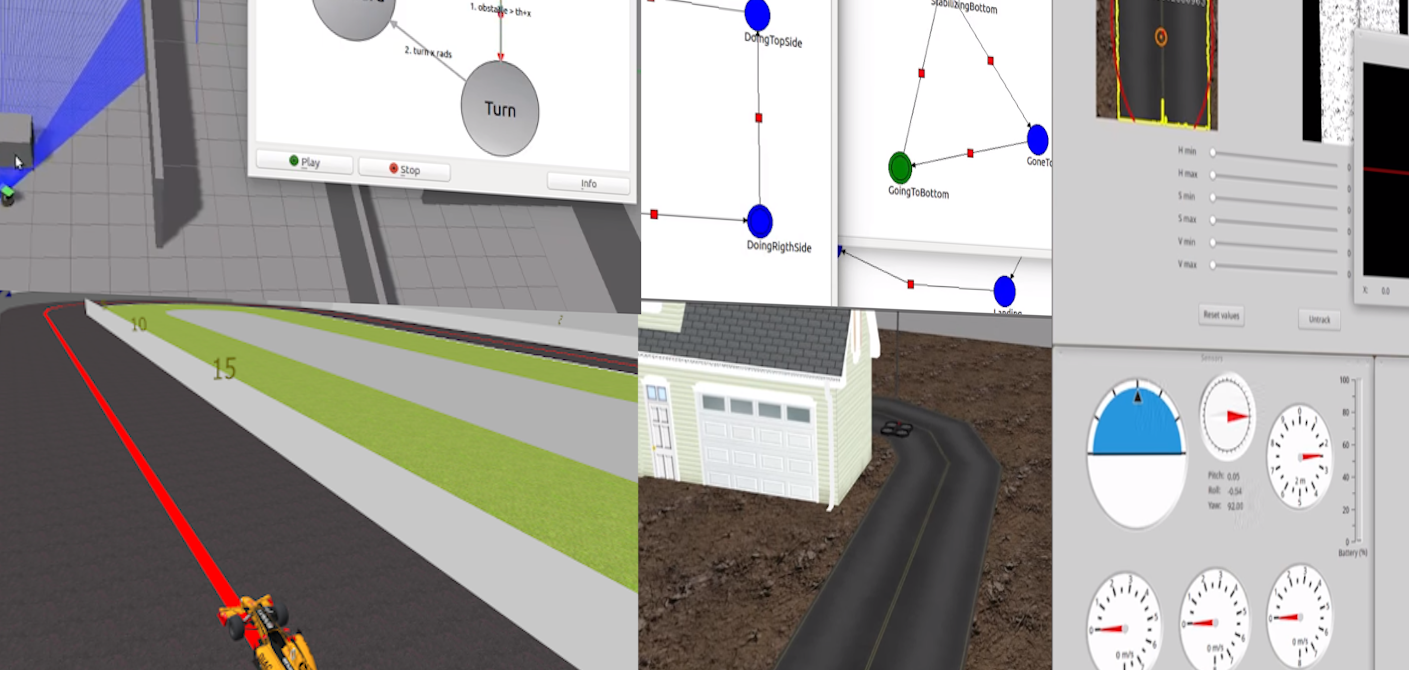
Robotics-Academy is an open source collection of exercises and challenges to learn robotics in a practical way. There are exercises about drone programming, about computer vision, about mobile robots, about autonomous cars, etc. It is mainly based on Gazebo simulator and ROS. The students program their solutions in Python language.
Each exercise is composed of (a) Gazebo configuration files, (b) a web template to host student’s code and (c) theory contents. The students insert their code in the template file and use the provided simple API to access to sensor readings and actuator commands (HAL API) and the provided simple API for Graphical User Interface and debugging (GUI API).
For execution the student launches a Docker image containing a Gazebo simulation and connects to a Django webserver to insert his code.


Do you want to contribute?
Info for Robotics-Academy developers: create a new exercise, improve documentation, fix bugs…. Contributors are welcome!
Releases
- 2.3
- Web pages for exercise templates
- Browser for editing user code and execution monitoring
- Dependencies are pre-installed in RADI Docker Image
- based in ROS-Melodic and Gazebo9
- works on Linux, Windows and MacOS
- 2.1
- ROS nodes for exercise templates
- File editing for user code
- Dependencies should be installed locally, debian and ROS packages
- based in ROS-Melodic and Gazebo9
- 2.0
Scientific papers
- Open-Source Drone Programming Course for Distance Engineering Education. José M. Cañas, Diego Martín-Martín, Pedro Arias, Julio Vega, David Roldán-Álvarez, Lía García-Pérez, Jesús Fernández-Conde. Electronics 2020, 9(12), 2163, MDPI 2020 (Special Issue Open Source Software in Learning Environments). DOI: https://doi.org/10.3390/electronics9122163
- A ROS‐Based Open Tool for Intelligent Robotics Education. José M. Cañas, Eduardo Perdices, Lía García-Pérez, Jesús Fernández-Conde. Applied Sciences 10(21), 7419, MDPI 2020 (Special Issue Advances in Artificial Intelligence Learning Technologies). DOI: https://doi.org/10.3390/app10217419
- Entorno docente universitario para la programación de robots. José M.Cañas, Alberto Martín, Eduardo Perdices, Francisco Rivas, Roberto Calvo. Revista Iberoamericana de Automática e Informática Industrial, 15, 404-415, 2018 DOI: https://doi.org/10.4995/riai.2018.8962
Sponsors